가속도계 교정
이 문서에서는 기본 가속도계 보정을 수행하는 방법을 보여줍니다( Mission Planner 사용 ). 자동조종 장치의 가속도계는 세 축 모두의 바이어스 오프셋과 축외 변화를 수정하도록 보정해야 합니다.
가속도계 보정은 ArduPilot에서 필수입니다.
차량이 무장된 상태에서는 가속도계 보정을 수행할 수 없습니다.
보정 단계
경고
보드가 비표준 방향으로 장착된 경우(예: 화살표가 앞을 가리키지 않음) 가속도계 보정을 수행하기 전에 AHRS_ORIENTATION 이 올바르게 설정되었는지 확인하십시오.
팁
매우 큰 차량의 경우 차량에 장착할 방향을 설정하고 차량에 맞게 보정 방향을 수행한 후 벤치에서 이 작업을 수행할 수 있습니다. 그런 다음 장착 후 다음 지침에서 레벨 보정 단계를 사용하십시오 .
설정 중 | 필수 하드웨어 왼쪽 메뉴에서 Accel Calibration을 선택합니다 .
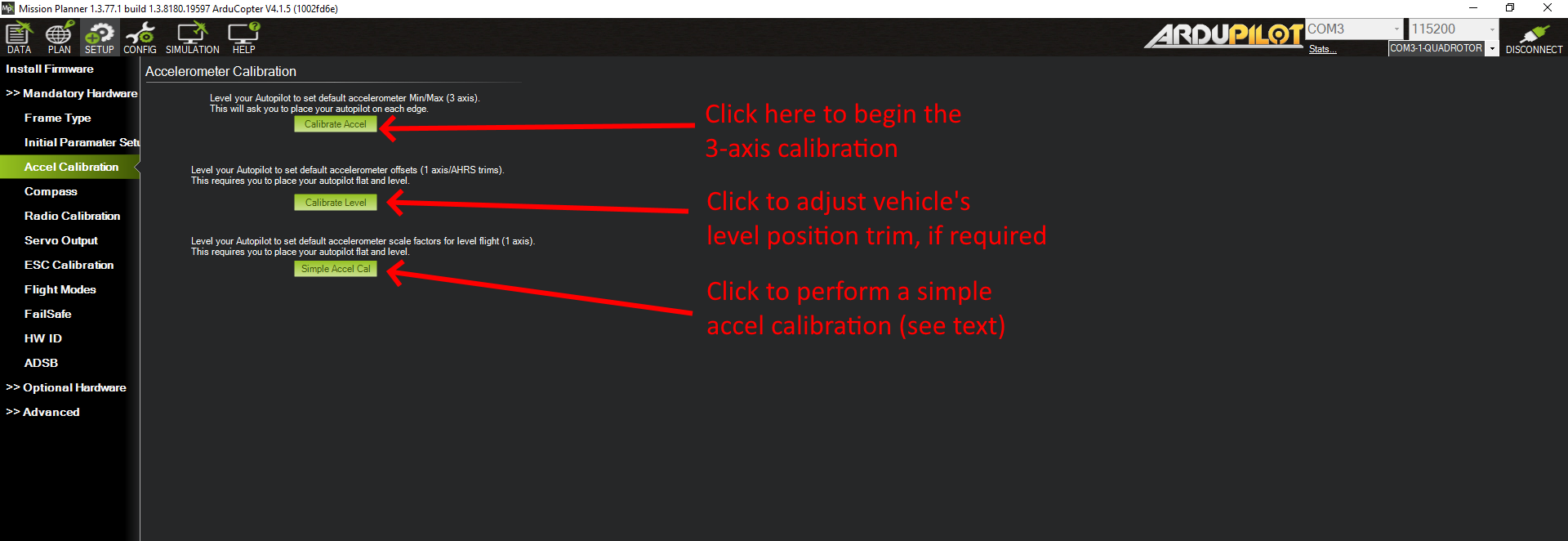
미션 플래너: 가속 보정¶
Calibrate Accel을 클릭하여 전체 3축 보정을 시작합니다.
Mission Planner는 보정 중에 각 축에 차량을 배치하라는 메시지를 표시합니다. 아무 키나 눌러 자동 조종 장치가 제 위치에 있음을 표시한 후 다음 방향으로 진행합니다.
보정 위치는 수평, 오른쪽, 왼쪽, 기수 아래, 기수 위로 및 등입니다.
가속도계 보정 위치(콥터)¶
각 단계에서 키를 누른 직후에는 차량을 정지 상태로 유지해야 합니다. 이것은 각도를 정확히 맞추는 것보다 더 중요합니다. 왼쪽은 수평으로 90도 등입니다. 첫 번째 "LEVEL"을 제외하고 위치는 정확히 20도 이내일 수 있습니다. 키를 누를 때 각 위치에 가만히 있는 것이 훨씬 더 중요합니다.
가능하면 차량에 장착된 보드를 보정해야 합니다.
그러나 차량의 크기/모양이 어려운 경우 장착하기 전에 보드를 보정해야 할 수도 있습니다.
수평 위치는 비행하는 동안 컨트롤러가 수평으로 간주하는 자세이기 때문에 올바른 위치를 얻는 데 가장 중요합니다.
자동 조종 장치를 설치하고 비행할 준비가 된 후 미션 플래너를 사용하여 이 레벨 위치를 재조정할 수 있습니다. 기체를 수평 비행 자세로 놓고 Calibrate Level 버튼을 사용하십시오.
메모
이 Calibrate Level 작업은 차량의 초기 보정과 최종 위치 사이의 차이를 최대 10도까지만 수정할 수 있으며 요(yaw)가 아닌 피치 및 롤 차이만 수정할 수 있습니다.
각 위치에 도달하고 그대로 유지되면 완료 시 클릭 버튼 을 사용하여 필요한 위치를 진행합니다 .
메모
자동 조종 장치에 IMU 히터가 내장되어 있는 경우 IMU 온도 보정 도 수행하는 것이 좋습니다 . 일부 자동 조종 장치는 공장에서 이 보정을 수행하며, 이 경우 이 보정을 수행할 필요가 없습니다.
간단한 보정
때로는 매우 큰 차량의 경우 전체 3축 보정을 수행하는 것이 쉽지 않습니다. 이 경우 차량을 정지 상태로 유지하고 수평 자세로 Simple Accel Cal을 수행할 수 있습니다. 이는 가속도계의 주요 오프셋만 보정하고 축에서 약간 벗어난 변화는 보정하지 않으므로 최적의 성능 측면에서 이상적이지는 않지만 때때로 허용 가능한 절충안입니다.
하지만, 이것은 Calibrate Level 기능 과 동일 하지 않습니다 . 이 기능을 사용하려면 전체 3축 또는 단순 보정을 먼저 수행해야 합니다!
Last updated



{kind=link}